Ihr Warenkorb ist leer
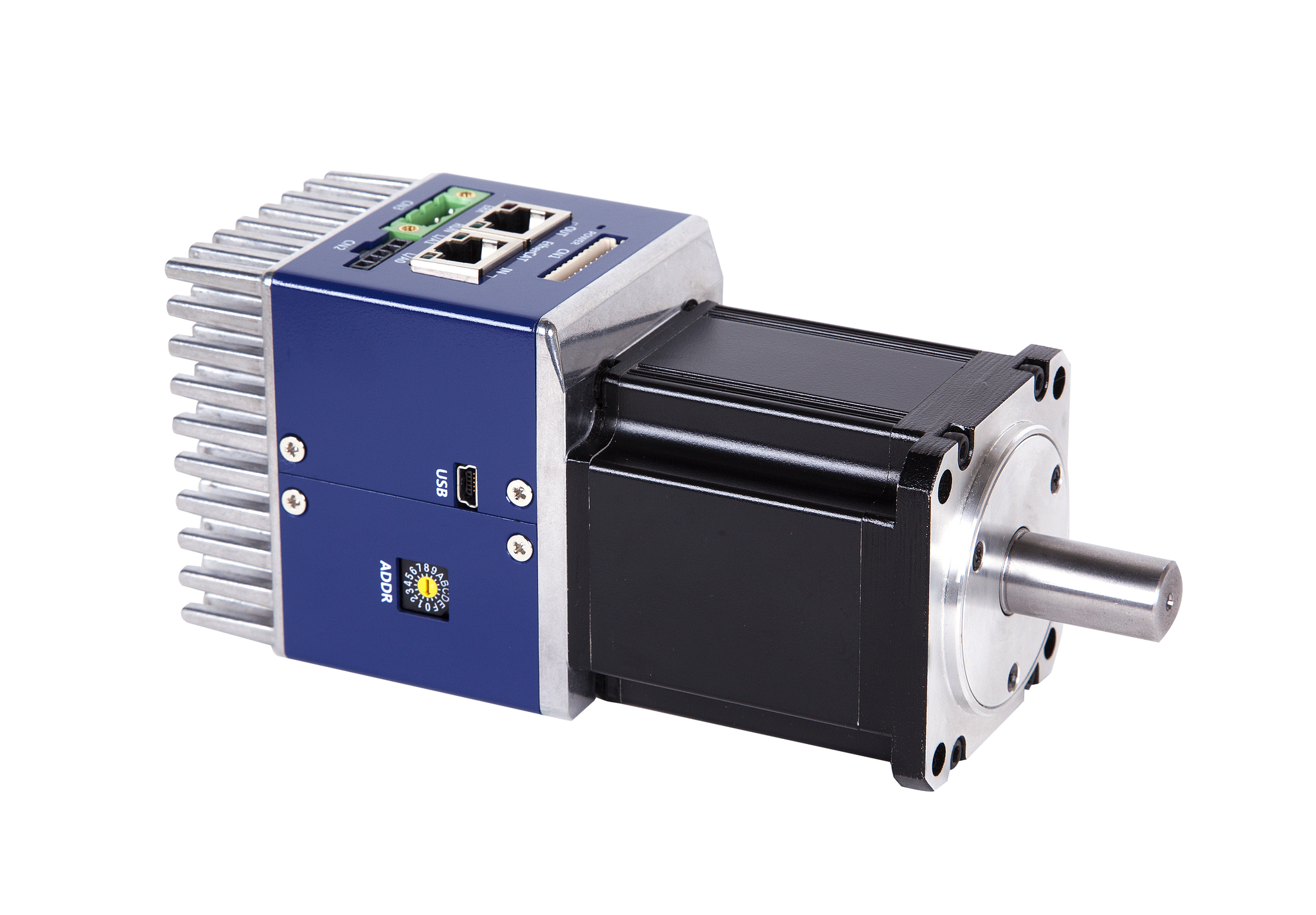

PEGASUS EtherCAT Servoantrieb
Verfügbarkeit: 
Alter Preis: 912.42 CHF inkl. MwSt.
Kurzbeschreibung
Art.-Nr: A000516PEGA-B03A-AN-MA
62mm Servomotor mit EtherCAT-Drive, 300W, 0.95Nm, 3000rpm, 24-60VDC, STO, 12bit-Singleturn Absolutencoder
Filter für Servomotoren
Flanschgrösse:62mmLeistung:300W
Drehmoment dauernd:0.95Nm
Nenndrehzahl:3000rpm
Eingangsspannung:24-60VDC
Rotor-Trägheitsmoment:0.321 Kg cm2
Feldbus:EtherCAT
Safety-Funktion:STO (Safe Torque Off)
Encoder:12bit Singleturn magnetischer Geber
Der neue Pegasus – Servomotor + Encoder + EtherCAT-Drive mit STO in einem Gehäuse – besticht durch seine Leistungsfähigkeit bei kompakten Abmessungen und lässt sich mühelos in EtherCAT-Umgebungen einbinden. Diese Neuentwicklung unterstreicht den technologischen Fortschritt von LS Mecapion, dem führenden koreanischen Servo-Hersteller aus dem LG-Konzern.
- Baugrösse 62mm: 300 Watt, 0.95 Nm, 3000 rpm, 24-60 VDC
- 12bit Singleturn Absolutencoder
- Servodrive mit EtherCAT und STO
- Integrierte Schutz- und àœberwachungsfunktionen: Kurzschluss, àœberstrom, àœberspannung, Thermosensor, Encoderfehler, Schleppfehler etc.
Kosteneinsparung
- Keine teuren Encoder- und Leistungskabel notwendig
- Keine Verkabelung und kein Platzbedarf im Schaltschrank
- EtherCAT mit Standard RJ45-Anschlüssen
- STO (Safe Torque off) integriert
- Keine neue Software notwendig: Inbetriebnahme z.B. mit TwinCAT (Beckhoff) oder CoDeSys (3S Software)
Fortschrittlich
- 12bit Singleturn Absolutencoder integriert
- Optimierte PWM-Algorithmen
- ASIC-Controller für Abtastung, Verstärkung und Signalausgabe des Encoders
- Neue Wicklungstechnologie abgestimmt auf Niedervolt-Betrieb
- Robust: geeignet für erhöhte Vibrationen
EtherCAT
Der Pegasus unterstützt verschiedene Kommunikationsstandards wie FoE, EoE und CoE. Die maximale Distanz zwischen zwei Knoten beträgt 100m.
- FoE: für Firmware-Updates
- EoE: für Parameter-Einstellung, Hilfsfunktionen, Kopieren von Parametern über Ethernet für Multi-Achsenanwendungen.
- CoE: Standard Drive Protokoll via IEC61158 Typ 12, Device Profile IEC61800-7 CiA 402 (device profile for drives an motion control)
Einsatzmöglichkeiten/Voraussetzungen
- Der Pegasus ist ein hochdynamisches und präzises Servosystem mit EtherCAT-Kommunikation für die Anbindung an eine EtherCAT-Steuerung.
- Für den erfolgreichen Einsatz des Pegasus werden Kenntnisse mit Servoantrieben generell sowie Kenntnisse mit der Software TwinCAT (Beckhoff) oder CoDeSys (3S Software) vorausgesetzt.
Â
Download Flyer PEGASUS, englisch (PDF)
Download Handbuch PEGASUS, englisch (PDF)

