Votre panier est vide
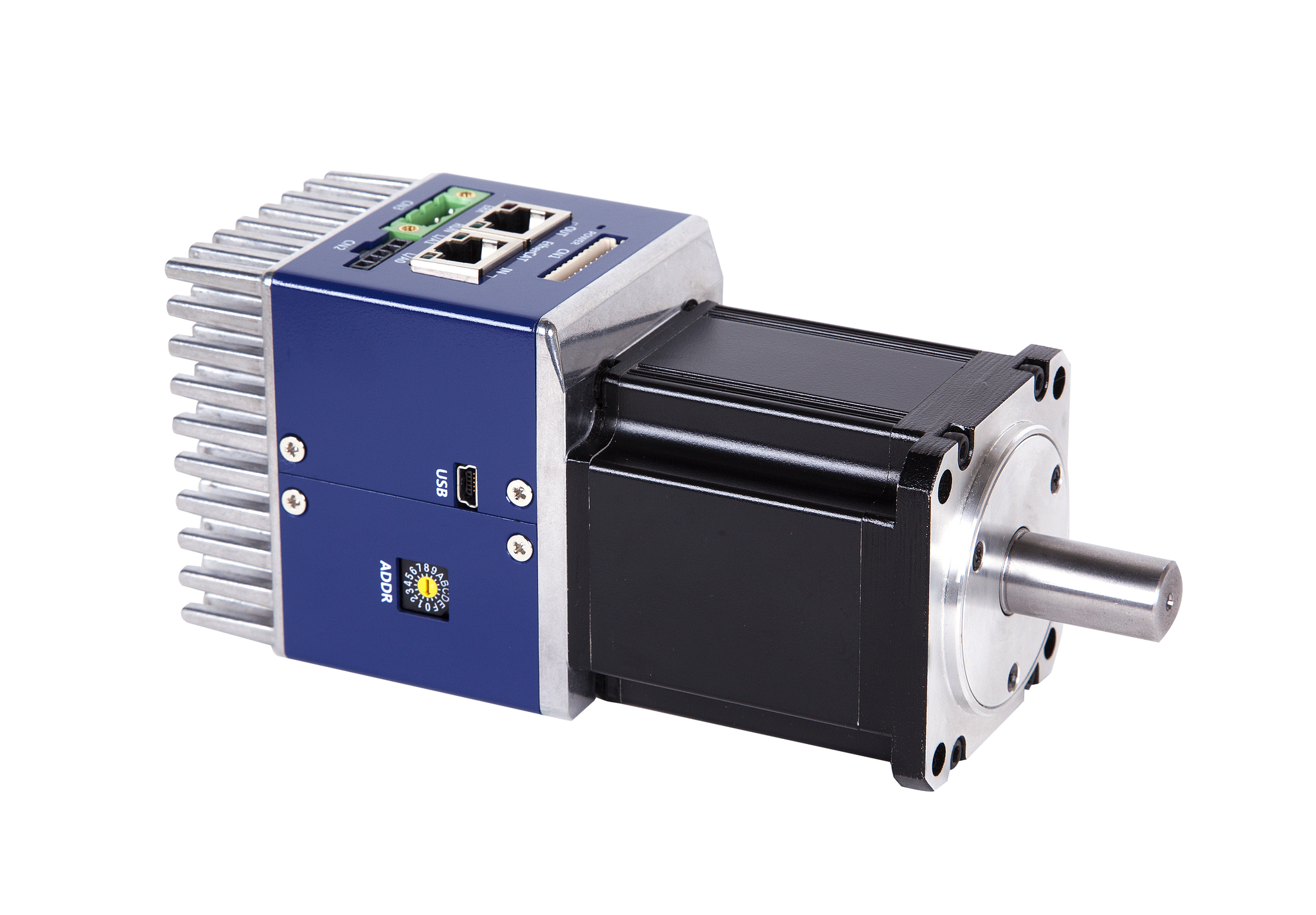

PEGASUS EtherCAT servo-entraînement
Disponibilité:
Ancien prix:912.42 CHF TVA incluse
Brève description
No. d'art:A000516PEGA-B03A-AN-MA
62mm moteur servo avec servoentraênement EtherCAT, 300W, 0.95Nm, 3000rpm, 24-60VDC, STO, codeur monotour absolu 12bit
Filtre pour servomoteurs
Flasque:62mmPuissance:300W
Couple persistant:0.95Nm
Nenndrehzahl:3000rpm
Alimentation:24-60VDC
Inertie rotor:0.321 Kg cm2
Bus de terrain:EtherCAT
Fonction safety:STO (Safe Torque Off)
Codeur:12bit Singleturn actionneur magnétique
Le nouveau servosystème Pegasus réunit dans un seul boêtier compact moteur + codeur + entraênement EtherCAT et STO. Offrant des performances élevées, son intégration dans les environnements EtherCAT est facile. Ce nouveau développement illustre la progression technologique de LS Mecapion, le leader coréen en matière de servomoteurs, qui fait partie du groupe LG.
- Modèle 62mm: 300 Watt, 0.95 Nm, 3000 rpm, 24-60 VDC
- Codeur monotour absolu 12bit intégré
- Servoentraênement avec EtherCAT et STO intégré
- Fonctions de protection et de surveillance intégrées: court-circuit, surcourant, surtension, capteur de température, erreur de codage, erreur de poursuite etc.
Economies
- Pas de coà»teux cà¢bles de codeur et de puissance
- Pas de cà¢blage ni d'encombrement dans l'armoire
- EtherCAT muni de raccordements RJ45 standards
- STO (safe torque off) intégré
- Aucun nouveau logiciel nécessaire: mise en service par TwinCAT (Beckhoff) ou CoDeSys (3S Software), par ex.
Progrès technique
- Codeur monotour absolu 12bit intégré
- Algorithmes PWM optimisés
- Contrôleur ASIC pour le balayage, l'amplification et la sortie du signal du codeur
- Nouvelle technique de bobinage adaptée au fonctionnement à basse tension
- Robuste: convient aux fortes vibrations
EtherCAT
Pegasus accepte différentes normes de communications, telles FoE, EoE et CoE. La distance maximale entre deux nÅ“uds s'élève à 100m.
- FoE: pour les mises à jour du micrologiciel (firmware)
- EoE: pour le réglage des paramètres, les fonctions auxiliaires, la copie des paramètres via Ethernet pour les applications multiaxes.
- CoE (CAN application protocol over EtherCAT): Standard Drive Protocol via IEC61158 Typ 12, Device Profile IEC61800-7 CiA 402 (device profile for drives and motion control)
Applications possibles et présuppositions
- Pegasus est un servosystème précis et à dynamique élevée, muni d'une communication EtherCAT pour l'intégrer à une commande EtherCAT.
- Pour utiliser efficacement Pegasus, il faut disposer de connaissances générales en matière de servoentraênements et de connaêtre les logiciels TwinCAT (Beckhoff) ou CoDeSys (3S Software).
Télécharger Flyer PEGASUS, anglais (PDF)
Télécharger Manuel PEGASUS, anglais (PDF)

